by Eric M. Sepp, Lt Colonel, USAF. May 2000
Recent research concludes that searching for and finding underground facilities is the most important step in dealing with these (“Cut and Cover” and “Deeply Buried”) targets, and that the United States must refine its capabilities for locating underground facilities. This line of reasoning leads naturally to the question of what specific approaches and technologies will help to locate deeply buried facilities.
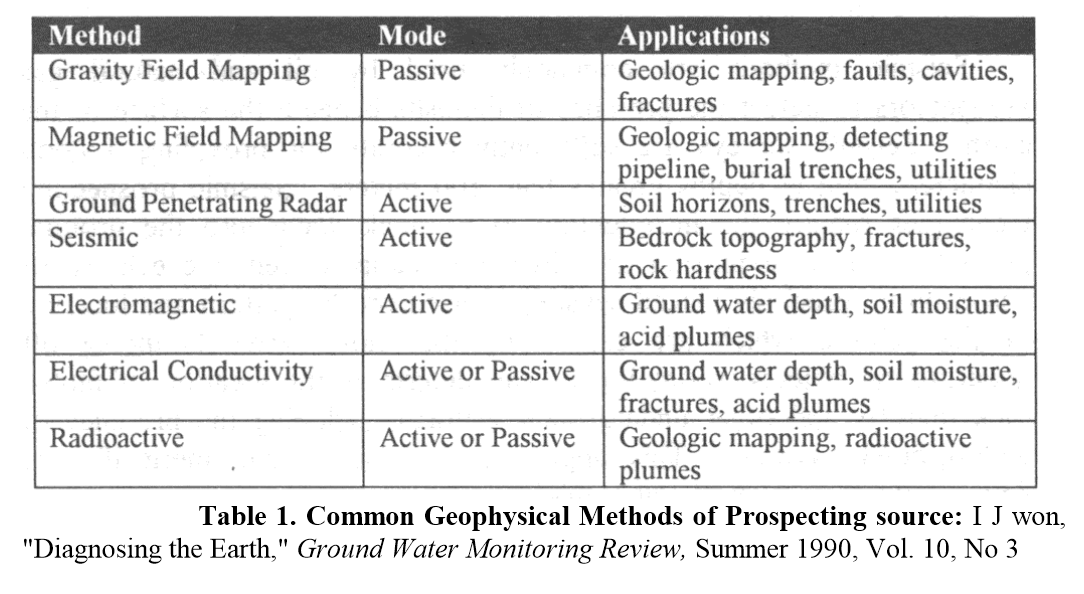
For background, scientists have been wrestling with this problem for decades, and have developed a variety of methods for locating objects that lie beneath the surface of the earth. As shown in Table 1, modern prospectors use instruments that rely on sensing various physical properties of the earth, including geophysical prospecting instruments that measure gravitational fields, electric fields, magnetic fields or sound waves, all of which help to deduce what lies beneath the surface of the earth.21 All of these fields (and waveforms) are altered by features in the earth, including contrasts in rock density and porosity, the liquid content of the soil, or changes in naturally emanating magnetic fields due to the density or absence of material from beneath the surface of the earth (i e, underground facility) Prospecting instruments collect information by using both active and passive methods.
Active Subterranean Mapping Methods
Active geoprospecting instruments use the emission of either sound waves or electromagnetic energy to characterize how these waves bounce off unseen objects. This is similar to the approach used by a submarine when it emits a sound (or “ping”) and listens for an echo to determine the presence of a solid object. By contrast, passive instruments sense the presence of fields, such as an infrared detector that passively senses the presence of heat.22 There are two other methods, ground penetrating radar and seismic reflection methods, for locating deeply buried facilities.
A Ground Penetrating Radar (GPR) is an active device that transmits a pulse of electromagnetic energy into the ground, which when it strikes objects, is reflected back to the receiving antenna GPR is an accurate means of detecting objects that are below the surface of the earth. Under the best circumstances, GPR can penetrate about 15 feet of sand, but is completely ineffective in saturated clays and moist soils. The principal use of GPR is by archeological surveys for detecting shallow objects that are embedded in the soil as well as burial pits and trenches, so that they can develop precise digging plans that will avoid destroying artifacts. Although GPR could be used to locate electrical, water, and sewage lines that may supply a deeply buried facility, its current size, weight, limited ability to penetrate the soil, and overt operational characteristics reduce its value for high-risk military operations when discreetness, mobility, and flexibility are critical.
Seismic methods are commonly used by oil and natural gas prospectors to detect the presence of deposits beneath the surface of the earth Seismic surveys are sufficiently accurate for providing a good characterization at depths greater than 100 meters. Seismic prospecting techniques require the introduction of a shock wave into the ground, normally with an explosion or a hydraulic tamp to generate echoes for detection by precisely placed sensors. Based on the pattern and location of the echoes, which are caused by the shock wave bouncing off underground objects, seismologists can determine the location of faults, rock density, and other underground features, including the presence of underground cavities. This approach may have some merit if it is developed into an operational capability. For example, during the Vietnam War sensors were mounted on spikes and dropped along trails to detect the presence of enemy forces.
In this way, seismic listening sensors could be mounted on spikes and showered over an area that is suspected of containing a deeply buried facility. The sensor spikes can be fitted with Global Positioning System (GPS) transmitters that communicate their precise three-dimensional position. Sensor spike deployment could be followed within a short time by GPS guided munitions that are programmed to hit the ground at precise impact points. The sensor spikes could listen for the echoes and transmit this data to an orbiting aircraft or satellite for the detection and location of hollow cavities and underground structures. This concept is technologically feasible.
Passive Subterranean Mapping Methods
By contrast, passive geoprospecting instruments operate on the basis of the principle that the continually varying density of the earth's crust alters the earth's magnetic field in measurable and predictable ways. The strength of the earth's gravitational field at any point on the surface of the earth depends on the density of the rock beneath the surface, which changes as one moves across the surface of the earth. This physical law enables the development of gravity sensing instruments, which are commonly used by geologists to measure the force of gravity over many small sections of land.23 The measurements that are obtained are compiled into a gravity map for an area, which are regularly used by the oil, gas, and mining industries to indicate the presence of hydrocarbon or mineral deposits below the surface of the earth. In the same way, gravity mapping can be used to indicate the existence of cavities or deeply buried facilities. But, defining the exact location of an underground facility is not a simple matter.Gravity Field Mapping
Given the different instruments that are available for seeing under the surface of the earth, the instruments most widely used for depths greater than 20 meters are those that are based on sensing the force of gravity. Gravity surveys, which are traditionally used for detecting salt domes and cavities in bedrock, are time consuming and overt activities. The gravimeter is moved meter by meter to presurveyed "benchmarks" to precisely measure the gravity vector (i.e., force and direction of gravity) As the force of gravity changes with changes in the density of subterranean features, one looks for the characteristic alterations in the gravity field that result from variations in the density (or absence) of material underneath the surface of the earth.24Small intervals between measurements are necessary to accurately define the edges of cavities that may exist underground. The microgravity engineering and archaeological surveys that are traditionally used for detecting cavities in bedrock often involve taking measurements at intervals of one meter. But the presence of soft soil under the gravimeter or the effect of wind blowing on the instrument can adversely affect the gravity reading and therefore skew the results. Furthermore, precise measurements of altitude (within 10 cm) and latitude (within 30 meters) are required for accurate results.25 In fact, obtaining accurate altitude and latitude measurements is currently the most difficult and time-consuming aspect of conducting gravity field surveys.
While gravimeters can measure the gravitational force at discrete points, this technology requires highly accurate, three-dimensional prospecting at each point prior to measurement. Fortunately, GPS has vastly simplified this operation. Modern gravimeters can make highly accurate gravity measurements at each station in less than half-an-hour, but are impractical for detecting underground facilities under the pressure of time that would exist in military contingencies.
Another instrument that is used in virtually all commercial and military aircraft, as well as intercontinental ballistic missiles, is the inertial measurement unit, or IMU. In comparison with a gravimeter, inertial measurement units measure changes in acceleration due to movement and reduce the movements to a calculation of its three-dimensional location in space. What would be most useful to prospectors would be to integrate the gravimeter and the IMU into a single instrument that accurately measures changes in gravitational fields while dynamically moving over the surface of the earth. This technology, which is known as a gradiometer, is being improved and miniaturized for mining and prospecting applications, and has operational benefits for military contingencies.
Gradiometers have been used in the US Navy's submarine fleet to stealthily detect underwater obstacles without having to visually sight them, and without having to emit an audible sonar "ping" that reveals the location of a submarine. Gradiometers can dynamically measure extremely small changes in the gravity gradient as the instrument passes over the surface of the earth or near objects.
The concept of gravity gradients is central to understanding gradiometers. As described earlier, while conventional gravimeters measure the overall force of gravity at a given point on the surface of the earth, gradiometers are comprised of up to six pairs of identical sensors (called accelerometers) in an instrument that takes twelve separate measurements of gravity at any given time.26 Each paired set of accelerometers is separated by a small gap between the two sensors.
For an aircraft flying over land whose subsurface consists of both low density and high density rocks, the gravity gradient immediately indicates the presence of less dense rock (or cavities) that lie underneath the surface of the earth, or the increase in force of gravity due to the presence of a large landform, such as a mountain.27 The ability to use gradiometers as a part of airborne surveys has significant military implications for locating deeply buried facilities.28
In the past, airborne surveys lacked detail, principally because of the limitations associated with the sensing equipment on aircraft Airborne surveys, rather than detailed mapping, were used to determine the gross features of the gravity field over wide areas. The subtle gravity perturbations that are produced by buried facilities would have been missed by a quick overflight of gravity sensing instruments because the instrument is unable to produce sufficiently accurate data, process that information quickly, and sense the micro-perturbations in gravity over the ever-changing subterranean density of the earth. However, with the increasing miniaturization of electronics and sensors, gradiometers can be used for the explicit purpose of detecting deeply buried facilities.
A concept for locating underground facilities involves the integration of a gradiometer, GPS receiver, and the ability to transmit raw gradiometer data to an airborne platform, such as an uninhabited aerial vehicle (UAV). In this case, a UAV could be programmed to survey an area and transmit the results in real-time. The ability to program a UAV to autonomously accomplish such a mission, from take off to landing, is feasible and in fact serves as the fundamental concept for the Air Force's Global Hawk UAV. Depending on the location of a buried facility and the threat posed by it, one could fly small remotely piloted vehicles (RPVs) over the suspected area.
The various RPVs of differing sizes and payload capacities that exist on the commercial market for prospecting and surveying could be modified for military operations. For example, the Sensoar RPV, which is manufactured by Remote Sensing Research, is a slow flying, radio controlled, gas or electric powered aircraft. 29 With a wingspan of 12 feet and weight of about 12 pounds, it is capable of taking low-altitude, high resolution photographs, or operating at altitudes greater than 10,000 feet. Its 4-pound payload capacity includes a GPS receiver and camera However, in place of the camera, a properly sized gradiometer could be integrated with GPS to perform airborne gravity surveys above areas that are suspected of containing deeply buried facilities.
Source: Deeply Buried Facilities: Implications for Military Operations http://www2.gwu.edu/~nsarchiv/NSAEBB/NSAEBB439/docs/Underground-DeeplyBuriedFacilities.pdf
References:
21. Dick Gibson, Primer on Gravity and Magnetics, Gibson Consulting Contract, www2.csn.net/~rigibson/gmprimr html.
22. This discussion draws on I.J. Won, "Diagnosing the Earth," Ground Water Monitoring Review, Summer 1990, Volume 10, No 3.
23. Newton's universal law of gravity, which describes the force of gravitational attraction, defined as F, between any two masses, clarifies this relationship in the following equation F = G (mlm2)/ r, where masses ml and m2 are separated by a distance r, and G is the universal constant of gravity. It is evident that if the mass of either of the objects or the distance between them is altered, the force of gravity will be altered It is this principle upon which gravity sensing instruments operate.
24. See Neil Fraser, "Seeing with Gravity," New Scientist, September 14, 1996.
25. Telford, W M., L P Geldart, and R E Sheriff, Applied Geophysics, Second Edition (New York, NY: Cambridge University Press, 1990), p. 24.
26. According to Newton's law of gravitation, if the distance between the object being measured and the accelerometers remains constant, there will be a slight difference in the force of gravity (F) detected by each of two accelerometers in any given pair since they are slightly separated. The difference in the force of gravity between the two accelerometers is the gravity gradient. The advantage of mapping gravity gradients, as opposed to simply the gravity vector, is that the gradients provide a more detailed and accurate picture of the subsurface.
27. Robin E Bell, ''Gravity Gradiometry," Scientific American, June 1998, p 78, who notes that the "erratic motion of the aircraft creates considerable "noise" in any single gravity profile, whereas measuring the difference between two sensors to obtain thc gradient automatically eliminates this source of error."
28. Ibid. 29. See Remote Sensing Research Home Page at http://www.rsr.org/platform.html
This article is part of the series: HAARP and the Sky Heaters
Also see our Space-Weather Modification Timeline
“I am forever a Boy Scout, lifetime artist, nocturnal programmer, music is my life, love is my religion, and I am the luckiest husband and father on Earth. I speak for the trees. I have a passion for mapping, magnets, and mysteries.”
About Jim Lee")